CAN 控制器的作用
Controller Area Network is a serial bus standard Used to connect Controllers.
控制器局域网是用于连接控制器的串行总线标准。
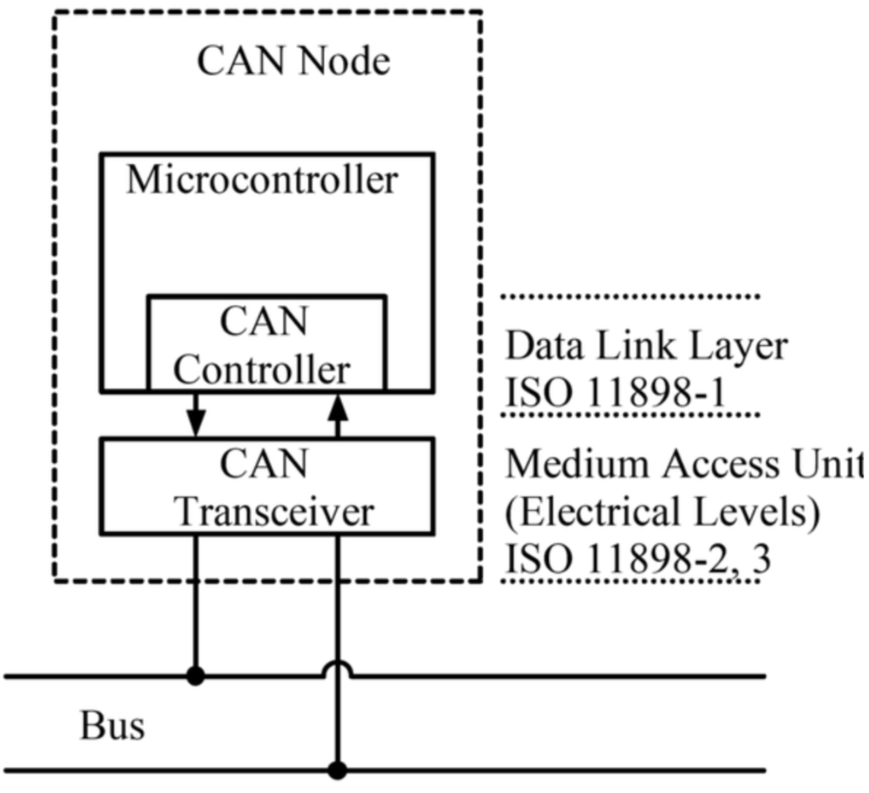
CAN Controller will be Part of the microcontroller which host CAN Node.
CAN 控制器是微控制器的一部分,用于控制 CAN 节点。
It has two major functions
它包含两个主要功能:
-
Receiving Message:
CAN Controller receives message from Tran-receiver one bit at a time(as the CAN bus is a serial bus)and Buffers all these bits until entire message is received. once message is received an interrupt will be triggered and it will be sent to higher layers for processing. -
接收消息:
CAN 控制器每次从收发器接收一个 bit 的数据(因为 CAN 总线是串行总线)并且将这些 bits 的数据缓存下来直到接收完整个消息。一旦消息被接收,就会触发中断通知上层处理。 -
Sending Message:
CAN Controller gets entire message from higher layers and transmits bit by bit whenever Bus is free. -
发送消息:
CAN 控制器从上层获取到整个消息,并在总线空闲时逐位传输。
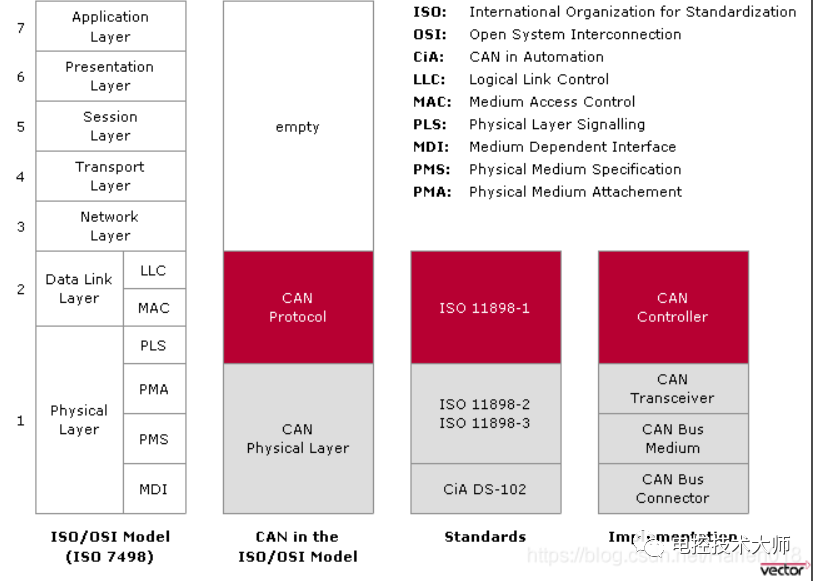
It act as a Data Link Layer when compared to OSI Model.
它相当于 OSI 模型中的数据链路层。